即时定位与地图构建(SimultaneousLocalization AndMapping)指的是机器人在自身位置不确定的条件下,在完全未知环境中创建地图,同时利用地图进行自主定位和导航。
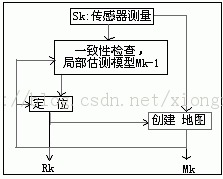
SLAM问题可以描述为:机器人在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和传感器数据进行自身定位,同时建造增量式地图。
- 定位(localization):机器人必须知道自己在环境中位置。
- 建图(mapping):机器人必须记录环境中特征的位置(如果知道自己的位置)
- SLAM:机器人在定位的同时建立环境地图。其基本原理是运过概率统计的方法,通过多特征匹配来达到定位和减少定位误差的。
移动机器人自定位与环境建模问题是紧密相关的。环境模型的准确性依赖于定位精度,而定位的实现又离不开环境模型。在未知环境中,机器人没有什么参照物,只能依靠自己并不十分准确的传感器来获取外界信息,如同一个盲人在一个陌生环境中摸索的情况。这种情况下,定位是比较困难的。有地图的定位和有定位的地图创建都是容易解决的,但无地图的定位和未解决定位的地图创建如同"鸡--蛋"问题,无从下手。已有的研究中对这类问题的解决方法可分为两类:一类利用自身携带的多种内部传感器(包括里程仪、罗盘、加速度计等),通过多种传感信息的融合减少定位的误差,使用的融合算法多为基于卡尔曼滤波的方法。这类方法由于没有参考外部信息,在长时间的漫游后误差的积累会比较大。另一类方法在依靠内部传感器估计自身运动的同时,使用外部传感器(如激光测距仪、视觉等)感知环境,对获得的信息进行分析提取环境特征并保存 ...