开始了解HTML
你和Web之间的唯一障碍就是学习使用其中的语言
HyperText Markup Language(超文本标记语言),简写为HTML。让我们先从宏观的角度看看HTML以及Web的工作原理
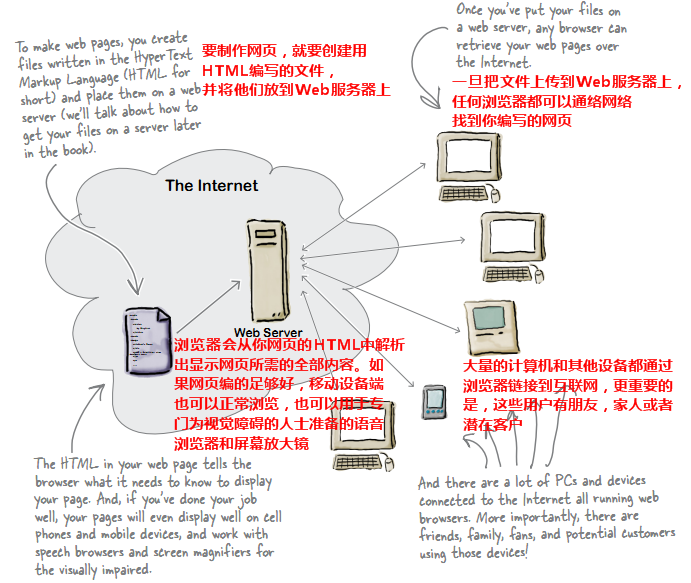
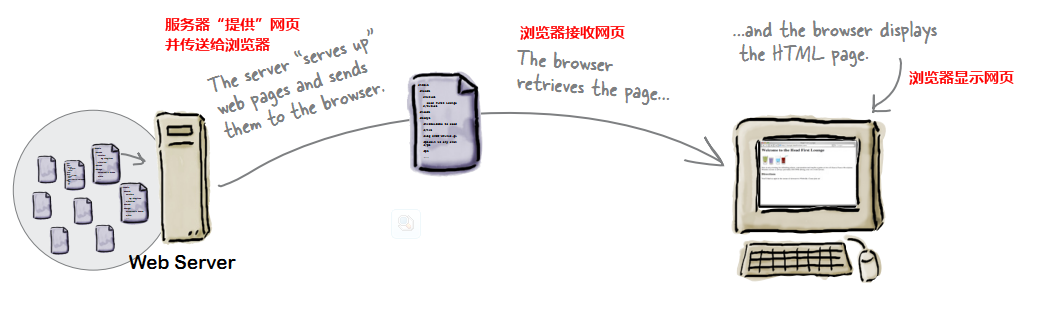
1.Web服务器的工作
Web服务器主要是处理浏览器的各种请求,包括浏览网页,图片,播放声音,观看电影等。
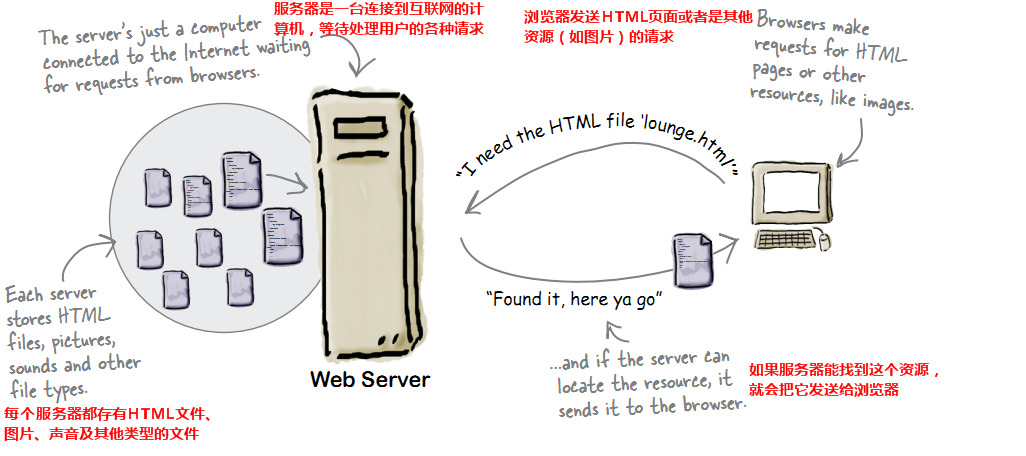
2.Web浏览器的工作
上网的过程中点击某个链接来浏览网页,你的点击会导致浏览器向Web服务器请求一个HTML网页,然后浏览器接收该网页,并在浏览器窗口中显示
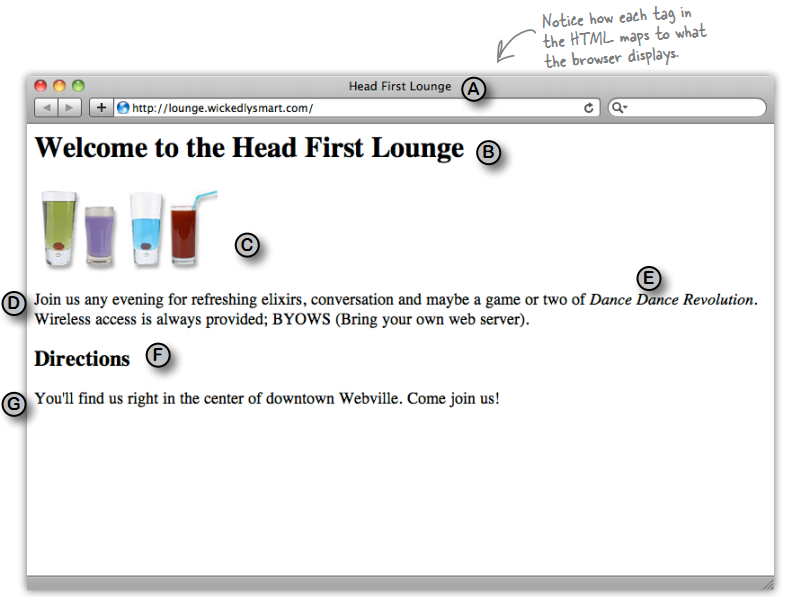
3.HTML例
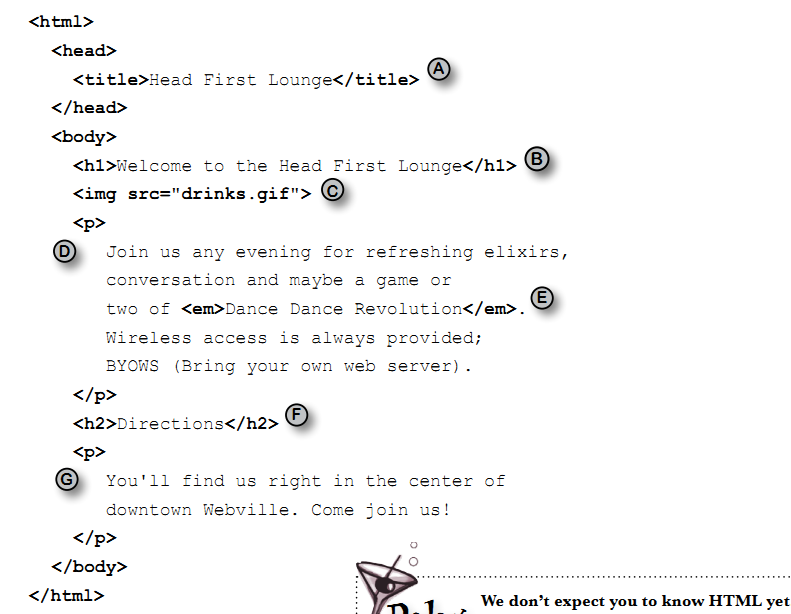
下面来看一个简单的例子,HTML源码如下:
4.浏览器创建了什么
当浏览器“阅读”HTML时,它会解析文本中所有的 标签,标签使用尖括号括起来的字母或者单词,例如<head>,<p>,<h1> 等等。标签告诉了浏览器文本的结构和意义。我们能通过HTML中的标签告诉浏览器哪些文本是标题,哪些文本是段乱,哪些需要强调,哪里需要放置图片。让我们来看看浏览器是怎么解析刚刚例子中的标签的